
Multi-Agent Systems (MAS) represent a significant domain in contemporary artificial intelligence research. In a MAS, multiple decision-making agents interact within a shared environment, pursuing common or conflicting objectives. A MAS comprises agents—computational entities or a combination of humans and agents—collaborating with each other and the environment to achieve specified goals. It’s acknowledged that agents may lack complete knowledge of both the environment and the internal states of other agents within the system.
Interaction between agents is a crucial feature facilitating the utilization of knowledge from other agents, enabling a rapid understanding of the environment. This interaction can take on cooperative or competitive forms. In cooperation, agents collaborate toward shared goals, aiming to distribute and share knowledge while leveraging each other’s intelligence to solve problems.
The system’s focus is on simulating the treasure hunt problem, employing different types of agents to optimize exploration and treasure collection. The world is represented as an undirected graph, and agents must cooperate and coordinate to navigate the map efficiently, considering time constraints and completing sub-tasks.
In this final delivery we will outline the complete implementation of the proposed multi-agent system for the treasure hunt problem. We will present the final architecture, and agent designs. We will also go over communication, coordination and cooperation approaches.
A structured and collaborative methodology was used to ensure a successful project outcome. Our approach included a series of key activities, underpinned by regular team meetings to facilitate effective communication and decision making. The meetings consisted of discussing the current status of the project and the next steps. A list of tasks was then created and divided among the group.
To carry out this methodology, we used several tools, some more management-oriented and others more implementation and code-oriented.
GitHub
To facilitate code management for the project, GitHub is a web-based
platform designed for version control and collaborative software
development. It allows developers to host and manage their code
repositories, track changes, and collaborate seamlessly. The entire
project is uploaded to a GitHub repository, allowing each team member to
contribute independently.
Google Drive
A cloud-based file storage and sync service. Google Drive from Google
allows users to store files in the cloud, access them across devices,
and collaborate on documents in real-time. As a cloud storage platform,
it serves as a repository for reports, presentations, and other
project-related documents. During meetings, Google Drive is used to
create files for new tasks and assignments.
Google Meet
Google Meet, a video conferencing platform, facilitates virtual meetings, video conferences, and webinars. Developed by Google, it supports real-time communication with features such as high-quality video and audio, screen sharing, and chat functionality. Google Meet is the tool of choice for conducting team meetings.
IntelliJ IDEA
As an integrated development environment (IDE) for coding and project
development, IntelliJ IDEA is specifically tailored for Java
development. Developed by JetBrains, it offers advanced coding tools,
intelligent code assistance and a user-friendly interface. Known for its
robust features, IntelliJ supports various frameworks and technologies
essential for this project.
Java
The primary programming language for the project, Java is known for its
versatility and object-oriented nature. Initially chosen because the
template is in Java, its platform independence becomes critical when
dealing with multi-agent systems with different dependencies and
configurations.
JADE [@jade]
JADE (Java Agent DEvelopment Framework) is an open source platform for
peer-to-peer agent-based applications. Implemented entirely in Java, it
simplifies the creation of multi-agent systems by adhering to the FIPA
specifications. JADE provides middleware and graphical tools for
debugging and deployment .
Dedale [@dedale]
Dedale, initiated and maintained by members of the MAS research group at the LIP6 Computer Science Laboratory, aims to improve experimental evaluation conditions for MAS algorithms. Focusing on decentralization in real-world scenarios, Dedale addresses multi-agent problems beyond simple setups.

Problem Analysis: Conducted a comprehensive analysis to thoroughly understand the project requirements and challenges.
Tool Familiarization: Download, prepare the project template, and familiarise with the new environment and IDE.
Draft Design: Developed an initial design outlining agent properties and defining their interactions. Selected and preproced a suitable map, and strategically distributed treasures.
Coordination Design: Reviewed and revised the initial design to enhance coordination among project components.
Implementation: Executed the project plan, translating the design into a tangible solution.
Testing: Rigorously tested the implemented solution to identify and address any issues or potential improvements.
Results Analysis: Analyzed the testing results to assess the effectiveness of the implemented solution and to inform future iterations or enhancements.
In this section, we will go into more formal detail regarding the environment specification. The proposed environment for the treasure hunt simulation is represented by an undirected graph. Uniquely identified nodes represent different locations that are connected by edges or paths which agents may use to move from one node to another. Nodes may house safes that contain the treasure that we aim to find.
The proposed environment has the following characteristics [@wooldridge2009]:
Initially partially observable, but as agents explore and collaborate they may eventually construct a complete map of the environment through collaboration.
Deterministic, as any action will have a single guaranteed effect.
Dynamic, since there are multiple agents acting over it an agent cannot assume that because it performed no actions between t1 and t2 that the environment will be the same. However, agents may assume node-local static behaviour, since only one agent may enter a node or edge at a time, and there are no other sources of dinamicity than agents' actions.
Discrete, since there is a fixed number of possible environment states.
Non-episodic, since the current decisions of agents will affect the current time-step and future ones.
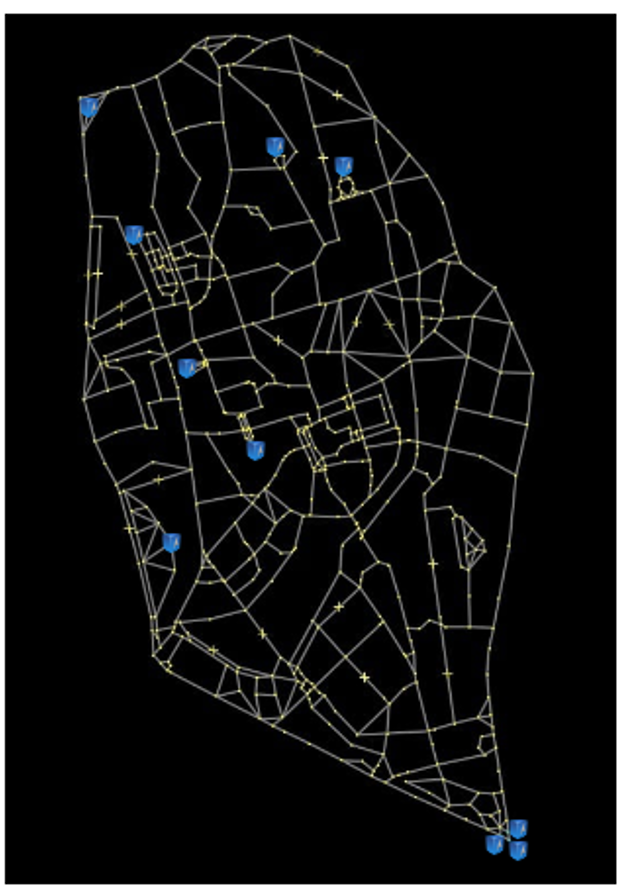
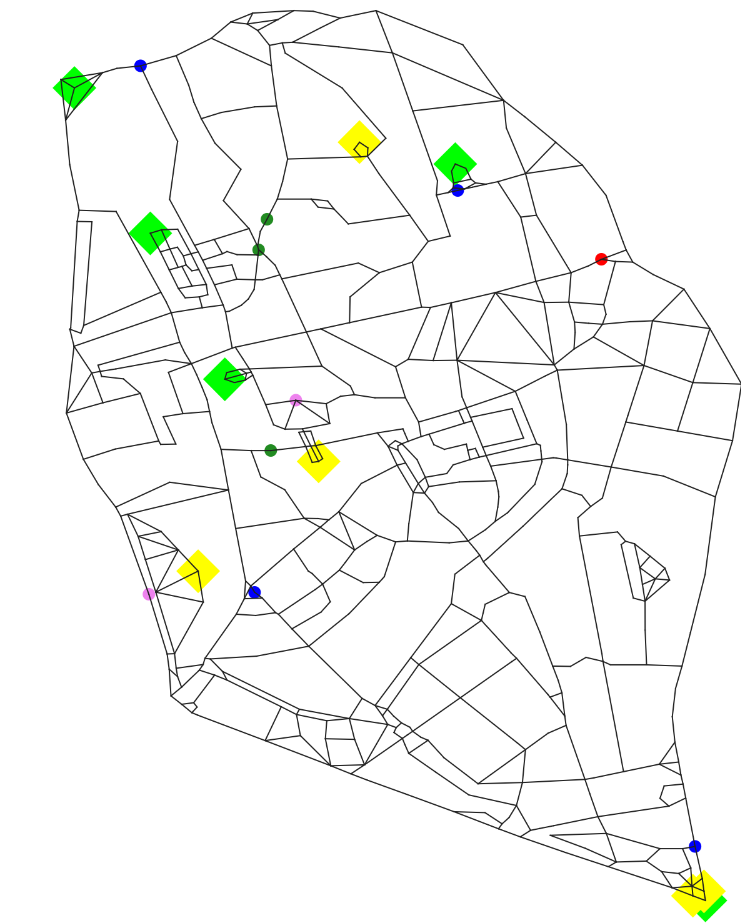
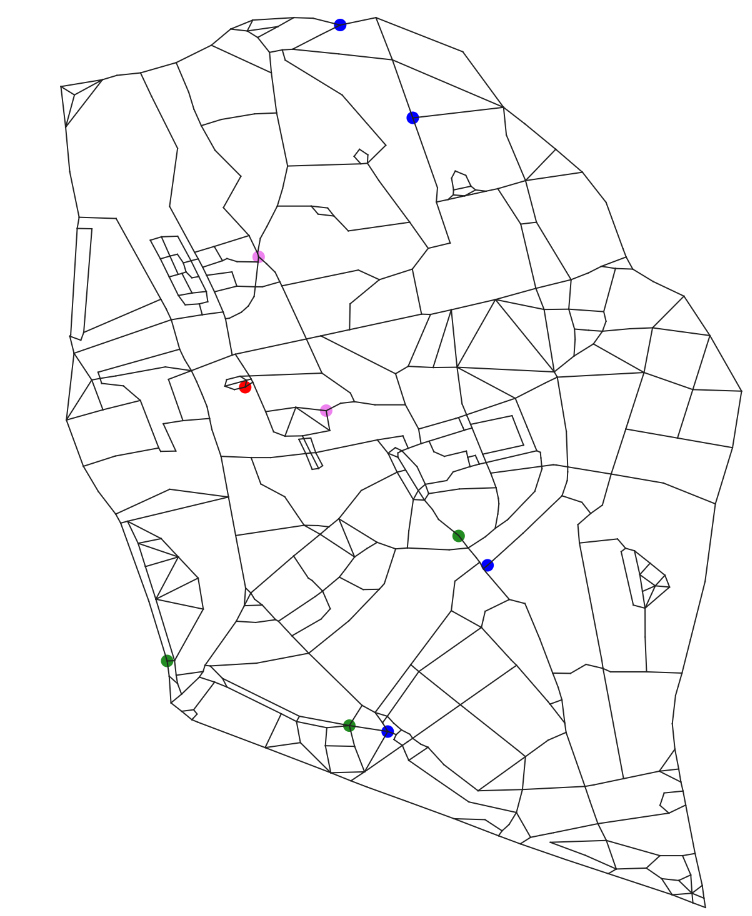
The map was based on the city of León in Spain. It was cleaned so that there were only 547 nodes. Additionally, new paths were drawn in to guarantee that the map was represented by a biconnected graph. Biconnected graphs are a special case of connected graphs. A connected graph is one in which there is at least one path between any pair of points, while a biconnected graph strengthens connectivity by requiring that there are at least two different paths to reach a node. Using a biconnected graph presents advantages such as reducing the risk of deadlocks by reducing the odds of two agents having to cross the same path simultaneously. Additionally, it makes coordination between agents more flexible, increases chances for exploration, and reduces bottlenecks by providing redundant connectivity.
Safes with treasure were placed along the map following the specified amounts for both gold and diamonds in the requirements for the practical work. They were scattered semi-randomly across the map. Some were placed completely randomly while others were placed in spots considered challenging to reach by the team. Figure [2] shows the map used for the environment and the location of the treasures.
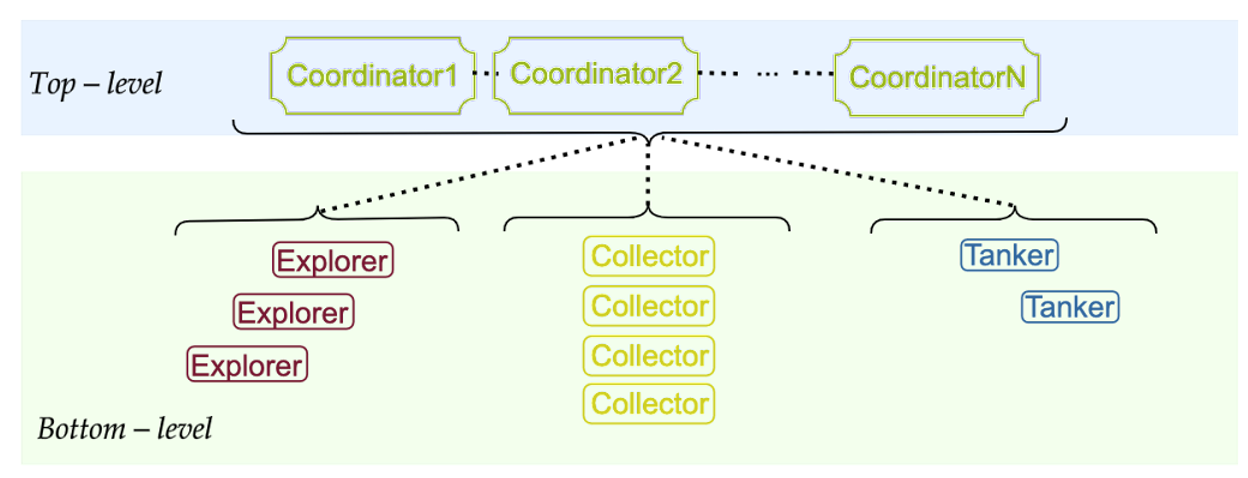
The design of a multi-agent system in charge of simulating a treasure hunt problem requires a structured and efficient architecture to manage the interaction of the different agent roles and to optimize the collective achievement of the overall objectives. In this section, we present the General Architecture of our multi-agent system, which comprises a hierarchy of agents and coordination mechanisms. This decision is supported by the explanations of different types of architectures in [@palau2019multiagent].
Our architectural framework is structured into two hierarchical layers, each serving distinct roles in the system. At the top level, we have the coordinators, which, as the name implies, function as intermediaries between the lower-level agents. In contrast, the lowest level includes the operational agents, the entities tasked with solving the intricacies of the treasure-hunting problem. These working agents represent the core workforce responsible for performing the actual problem-solving tasks.
This design framework allows for better interaction between the various agents, ensuring that the multi-agent system works coherently and cooperatively pursuing the goal of optimizing treasure collection while dealing with the complexities of an unfamiliar map and locked safes.
Key points about our hierarchical structure are:
Clear division of labor and responsibilities. With this hierarchical structure, we seek to have a well-defined division of labor and responsibilities among the different types of agents. With this, we want each type of agent to know their role and tasks within the system, so that redundancy and overlapping of tasks are reduced while optimizing the use of resources.
Clear division of knowledge. It is not viable in most cases for all agents to have complete knowledge of the environment state since that would require a deadlock-prone shared structure. The introduction of manager agents allows for better bookkeeping without causing issues for the lower-level agents. This is the backing of the blackboard subsystem that will be described in section.
Top-level coordination. The coordinators play a crucial role as brokers. They can communicate hints to the low-level agents according to the needs of each state of the environment.
Focus and Adaptability of Regular Agents. The regular agents at the bottom of the hierarchy are very reactive, this allows them to quickly adapt to unexpected obstacles, such as deadlock problems, however, this also causes issues since they only experience a very localized section of the environment. The managers help reduce the impact of this agent characteristic by providing more proactive reasoning.
We initially considered a three-layer hierarchical design for our architecture, with a general coordinator as the top layer, which was discarded later on, due to the complexity of agent communication. Recognizing an excessive number of coordinators and unnecessary complexity and centralization, we simplified the structure to a more efficient two-layer model. This decision struck a balance between simplicity and functionality, in keeping with the straightforward nature of the treasure-hunting problem we were trying to solve.
Within the hierarchical architecture of our multi-agent system for the treasure hunting problem depends on the unique roles and capabilities of the agents in the environment. These agents must explore the unknown map, collect treasure, and coordinate their efforts efficiently. In this section, we provide a concise definition of the types of agents—Explorers, Collectors, and Tankers—specifying their type, attributes, responsibilities, assigned tasks, and utility functions.
There are three required types of agents: Explorers, Collectors, and Tankers. Additionally, we added coordinator agents. Many different classifications can be done between the agents to explain their specifications.
The proposed architecture is shown in the figure [3].
The Coordinator role is responsible for overseeing the progress throughout the entire simulation. It must maintain communication in order to know the status updates of the environment and to be able to record the progress being made, the resources used, and in general the performance of the system in the resolution of the task. Moreover, it is responsible for the communication between the bottom-level agents, they act as mediators. The attributes for the coordinator agents are shown in Table [1].
Responsibilities:
Maintaining a focus on long-term global objectives.
Keeping track of discovered treasures, and their state.
Maintaining statistics.
Facilitating communication between agents: Receiving and processing requests or updates from bottom-level agents, and updating the blackboard as a response.
Mobilizing the agents to treasure spots when necessary.
| Agent | Gold Cap. | Diamond Cap. | Detection Radius | Communication Range | Lock picking | Strength |
|---|---|---|---|---|---|---|
| Coordinator | -1 | -1 | 0 | 30 | -1 | -1 |
Bottom-level agents are the ones that perform the core tasks of exploring, collecting, and transporting treasures. These agents are classified as collaborative agents as they must interact and cooperate between them and with the coordinator to achieve the given goals. The proposal for these agents is to focus on a lightweight, reactive architecture for quick responses and robustness.
Responsibilities:
Executing specific tasks related to their roles as described in the general definition.
Reacting to changes in the environment.
Go to the locations the coordinators require them to travel to.
Collaborating with other agents and coordinators as necessary.
Their general definition is as follows:
Collectors.
Their main goal is to transport treasures to the tankers, which will receive all of the treasure the collectors are carrying when they come within range.
Can carry a limited amount of either gold or diamonds, depending on their configuration. Moderate lock-picking and strength.
With the help of explorers and coordinators, they should travel to the most treasure-dense areas.
They should communicate with coordinators to update the current environment status.
Tankers.
Their main goal is to store all the collected treasure.
Can carry large amounts of both gold and diamonds. They have no strength or lock-picking skills.
They may move freely over the map, however they should ideally be near the most treasure-dense areas.
Explorers.
Their primary goal is to systematically explore the unknown terrain, constructing a comprehensive map of the environment
They have high lock-picking and strength, however they have no carrying capacity.
They should communicate with managers to update the current environment status.
The attributes for bottom-level agents are presented in Table [2], and were selected in accordance with the project description.
| Agent | Gold Cap. | Diamond Cap. | Detection Radius | Communication Range | Lock picking | Strength |
|---|---|---|---|---|---|---|
| Tanker1 | 400 | 400 | 0 | 30 | 0 | 0 |
| Tanker2 | 400 | 400 | 0 | 30 | 0 | 0 |
| Collector1 | 50 | -1 | 0 | 30 | 1 | 1 |
| Collector2 | 50 | -1 | 0 | 30 | 1 | 1 |
| Collector3 | -1 | 50 | 0 | 30 | 1 | 1 |
| Collector4 | -1 | 50 | 0 | 30 | 1 | 1 |
| Explorer1 | -1 | -1 | 0 | 30 | 2 | 3 |
| Explorer2 | -1 | -1 | 0 | 30 | 3 | 2 |
| Explorer3 | -1 | -1 | 0 | 30 | 3 | 2 |
The treasure hunting problem is a challenge where problem division is important to ensure efficiency, especially when considering a multi-agent approach. This division allows us to address different aspects of the challenge in a specific way, and identify diverse necessary tasks such as the exploration of the map, the collection of the treasure and the roles of the agents. By dividing the problem we allow each sub-problem to be addressed in a simpler, and more structured way.
Map exploration:
Goal: Discover the unknown map efficiently to identify nodes, edges, and possible treasure locations.
Method: We will use Dedale’s predefined ExplorerCoop agent together with a blackboard for knowledge sharing with managers, that may then send agents to new locations based on this information.
Challenges: Understand Dedale’s implementation in order to craft other agents around it. Implement a new manager agent definition, treasure objects and blackboard solution.
Treasure Collection:
Goal: Optimize treasure collection by ensuring efficient routes and coordination between agents.
Method: Coordinating agents will interact with lower level agents to identify the optimal agent to unlock/collect a treasure based on their location and skills. Assign Collector and Explorer agents the task of opening safes and collecting treasure, collaborating with Tanker agents for storage.
Challenges: Locked safes, varied skills needed to open them, and the need to make decisions based on the state of the environment.
Communication and Information Sharing:
Goal: Establish an effective communication dynamic between agents to share map updates, treasure locations, and routes between specific points as necessary.
Method: Take advantage of Dedale’s predefined sharing techniques, include a black board for information-sharing.
Challenges: Limited scope of communication, potential information overload, and coordination complexities.
Deadlock Management:
Goal: Avoid deadlocks, especially in scenarios where agents cannot exchange positions, and manage them when they arise.
Method: Apply a strategy based on random movement to free agents from deadlocks.
Challenges: Limited maneuverability in confined spaces and possible conflicts in the coordination between agents.
The Contract Net [@smith1980contractnet] has been chosen as the main mechanism for the task sharing between agents, as it can be integrated perfectly for the problem and the architecture of the multi-agent system proposed. Such system fits perfectly because the tasks in which the problem is divided can be easily defined and solved using this contract based system and the roles defined can be accommodated to our multi-agent system by giving the coordinators the manager role and the low-level agents the contractors role. Also, the implementation for this system is available in JADE, which eases the implementation process. These contracts would begin once a coordinator receives a notification from either an explorer or an agent via the subscription method which will be explained later on the document.
For every task that has to be completed during the treasure hunt, the coordinator receiving the notification will begin the process established by the contract net protocol:
The coordinator recognizes the task that has to be performed depending on the notification received.
The coordinator announces the task to the corresponding agents in its communication range.
Each of the agents that receives the announcement decides if they want to do the task and if so, they bid by submitting a tender.
Based on the messages received from the agents, the coordinator decides which is the best based on a cost function and assigns the task to such agent, rejecting the others.
After the process has been defined, two types of contracts that coordinators will create are explained below. Each of the contracts has a cost function, which will be used by the coordinator to decide which agent/s it will assign the task to:
| Contract | Task description | Contractors | Cost function |
|---|---|---|---|
| Open safe | Unlocking a treasure safe | Explorers and/or Collectors |
See Equation 1. |
| Collect treasure | Collecting a treasure | Collectors and Tankers |
See Equation 2. |
Note that the contractors are explorers and/or collectors for the first contract, which means that a combination of agents can be chosen regardless of their type. On the other hand, for the second contract, collectors and tankers are defined as contractors as one agent of each type has to be selected.
Eq. 1 $$C = d + \alpha(lp_a - lp) + \beta(s_a - s)$$
Eq. 2 $$C = d$$
| Variable | Description |
|---|---|
| C | Cost |
| d | Distance from objective node to agent node |
| α | Importance factor of lock-picking difference |
| β | Importance factor of strength difference |
| lpa | Lock-picking attribute of agent |
| lp | Lock-picking requirement of safe |
| sa | Strength attribute of agent |
| s | Strength requirement of safe |
The cost function depends on the distance between the objective node and the current node and additionally, since the possible contractors have different lock-picking and strength attributes, the cost function is designed to take if possible, the agent for which the difference between its attributes and the safe requirements is the lowest possible in order to complete the task with the bare minimum, leaving agents with larger capabilities free for other tasks.
Also, for a combination of agents, the cost function would take as parameters the sum of the parameters for each individual agent, so that each parameter would look like the following:
d: sum of distances from each agent to the objective node
\(lp_a\): sum of lock-picking attribute of each agent
\(s_a\): sum of strength attributes of each agent
Since in this case all of the contractors have the same attributes, the distance is the only parameter included in the function.
However, a contract might be not feasible for any agent within the coordinator’s radius. Therefore, a broadcasting option will be defined for the coordinators:
Coordinators will act similar to a proxy server, if they can find an agent within their radius able to complete the corresponding task, they will choose the best one and wait for the task to be completed. However, if they cannot find any agent within its communication radius able to perform the task, they will broadcast a message to all the coordinators in its range defining the task and asking each one of them for an agent that can complete it and its cost. Finally, after comparing the cost of each of the options received, an agent will be chosen and it will perform the task.
Also, since it may happen that an agent receives an offer while completing another task, when bidding for a contract, such agent will indicate that it is indeed doing another task and the cost remaining for such task so that the total cost of performing the new one will be the sum of the new one plus the remaining of the current one.
A key challenge we need to tackle is how well the agents are informed globally about their progress in obtaining the treasure.
Implemented as a centralized global list accessible to manager agents that will store the found treasures' node ID, lock state, total weight and type. Explorers and collector will communicate with the manager who will update this data structure on an as-available basis.
This is the definition of the Treasure class:
id: The node containing the treasure.
maxAmount: The total amount of gold or diamonds in the treasure.
state: If the treasure has been is locked, unlocked or collected.
type: The treasure has gold or diamond.
The blackboard itself was implemented as an expansion of Dedale’s predefined MapRepresentation.java implementation by making such object a Singleton and adding a treasure list as one of its attributes.
The goal of coordination is to solve the problem of inter-dependencies between the activities of agents. Additionally, coordination in multiagent systems poses an interesting additional challenge, it must happen at run time, which means agents must be capable of recognizing the relationship between their actions and managing them as part of their activities. Another important thing to note is that for our project we will use offline designs, in which social laws are hardwired into agents (Woolridge, 2009).
In our case, the most obvious example of an inter-dependency between agents' actions is the deadlock problem, in which no two agents may enter the same node or traverse the same edge simultaneously, so they depend on each other’s movement to be able to move. (Woolridge, 2009).
According to von Martial’s typology of coordination relationships, we can identify the relationship that causes the deadlock problem as a negative relationship of competition over a non-consumable resource, since the presence of agent a on a node or edge loc is incompatible with the presence of agent b in loc, but one may use loc after the other has left. (von Martial, 1990)
We will handle deadlocks internally within each agent. Each agent will check if the node it want to travel to is occupied, if it is not, it will advance. Otherwise, it will use random movement repeatedly until it gets out of the deadlock.
The reasoning behind using this function is that it reduces message passing amongst agents, which in turn increases the system´s independence. It allows agents to handle deadlocks independently and without a manager´s intervention. In this way, we increase agent autonomy. Finally, this approach was also selected due to its intuitivity and ease of implementation.
Smarter approaches with priority functions could be used, however this would increase the amount of message-passing, and communication cost could eventually become a bottle-neck. This particular issue could also be solved by using coordination by mutual modeling, but it would require more mathematical modeling which entails its own challenges. For our small-scale model using a social norm should work well enough.
In Von Martial’s typology of relationships, an agent proactively opening any locked safeboxes it finds along the way exploits a non-requested positive relationship. This is due to the fact that sometimes an agent may have the lock-picking skill and strength required to open a safe, so although opening the lock will not immediately be beneficial to that agent, it can help the collective goal without any significant overhead. This is why, whenever possible, an agent will lockpick any treasure box it encounters. (von Martial, 1990)
The activities of opening the safe and collecting the treasure don’t need to be strictly coordinated, since the system can wait for an agent or group of agents who can both open the safe and carry the treasure to arrive. However, by proactively opening it, an agent may save time by facilitating the retrieval of the treasure later on, which increases the overall utility. This behaviour was implemented for all agents with lock-picking skills.
When a collector is picking a treasure, it will stay in that spot until the treasure has been cleared. However, this is only useful if there is a tanker agent within range, otherwise the collector would only stay by the treasure without actually collecting any more of it. When this happens, the tanker agent will be proactively sent to the correct location by the manager agent, so that the entire treasure can be collected on one go, minimizing the number of movements the collector has to make.
After finishing the mapping, the manager will send explorers to the treasures that have not been opened yet according to the blackboard. This way the explorer agents still have tasks to accomplish after mapping, and they are not idling, and we can more efficiently open the treasures with higher lock-picking and strength values.
In the final step of our development process, we conducted a thorough reconsideration of the coordination and communication design presented on previous deliverables. Notably, the role of the coordinator as a mediator was discontinued, as the publish/subscribe method introduced complexities in communication that proved challenging to overcome. Despite this change, coordinators retained their organizational role, tasked with structuring tasks and providing directives to the low-level agents.
To facilitate an unified approach, the map representation has been streamlined into a singleton, ensuring that all coordinators and agents operate with the same map instance. This promotes consistency and avoids discrepancies in spatial understanding among different components of the system. In Java, a singleton is a design pattern that restricts the instantiation of a class to ensure that it has only one instance and provides a global point of access to that instance.
Additionally, the list of treasures has been designated as a global variable accessible to all coordinators, and it is editable by the explorers. Such list contains information about the treasures discovered by the explorer agents, including the node where it is, its type or the state of the treasure.
Also, since the social norms of proactive lock-picking and lock-picking after exploration are implemented, there is no need to make use of a contract network to organise agents for the opening of treasure safes. This means that in the end the contract network is only used for the collection of treasures and only involves collectors as contractors. And since only one manager is being used, no message forwarding is performed.
Finally, we are working with just one coordinator.
While each agent shares a common basic behavior in terms of movement and properties, each agent is assigned different tasks that introduce significant variations in their roles.
Before delving into the specifics of each agent’s behavior, certain considerations were taken into account. In particular, the movement patterns of the agents have evolved beyond pure randomness. In contrast to the initial approach, agents are now restricted from revisiting their previous nodes, preventing backward movement and introducing a more purposeful exploration strategy.
As deadlocks occur when an agent is unable to move in the direction it wants, a behavior modification is included in order to cause a random movement for a few ticks if the agent is unable to move due to a deadlock.
The primary role of explorer agents is to actively generate knowledge about the map and facilitate information sharing with other agents. These explorers maintain a representation of the world they traverse, creating a graph representation of the map as they explore. As they navigate the environment, explorer agents meticulously record the nodes they visit, contributing to the comprehensive map graph. At the same time, they keep track of the treasures they find, noting their exact locations on the map.
Upon encountering a treasure, an explorer agent dynamically updates its status to "found" and identifies the location node where the treasure is located.
In addition to exploring, all explorers have the unique ability to pick locks, a skill that is determined by the values of their respective traits. Once the exploration phase is complete, the explorer agents transition to the pick-lock phase, using their acquired knowledge and skills to further optimize the treasure hunt scenario.
This is the algorithm that follows these agents:
The discovery of a treasure triggers a dynamic process in which the nearest collector agent quickly travels to the location of the treasure. Once at the location, the collector proceeds to pick up the treasure. The collector then assumes a standby position until a tanker agent enters the communication range. The transfer of the treasure takes place when the collector and the tanker are in the same communication range.
This is the algorithm that follows these agents:
This is the algorithm that follows these agents:
The coordinator has two main responsibilities: running the contractNet to manage tasks, and sending messages to the agents.
When a treasure is discovered, the coordinator initiates action by dispatching the nearest collector to the treasure’s location. Once a collector has successfully retrieved the treasure, the coordinator takes over again. He issues instructions to send a tanker to the collector’s current location. At the same time, the collector remains stationary and waits for the tanker to arrive.
These are the algorithm that follows these agents:
Functions related to map representation, focusing on the definition of a graph, have been implemented in the project template. Building on this foundation, additional functionality is integrated to improve the organization of the treasure within the system.
Implemented methods:
addTreasure(id, amount, type): Adds a new treasure with a given
ID, amount, and type.
unlockTreasure(id): Unlocks a treasure with the specified ID.
checkUnlocked(id): Checks if a treasure with the specified ID is
unlocked.
updateTreasure(id): Updates the state of a treasure with the
specified ID to "COLLECTED."
getUnlockedTreasures(): Returns a list of unlocked treasures.
getTreasures(): Returns a list of all treasures.
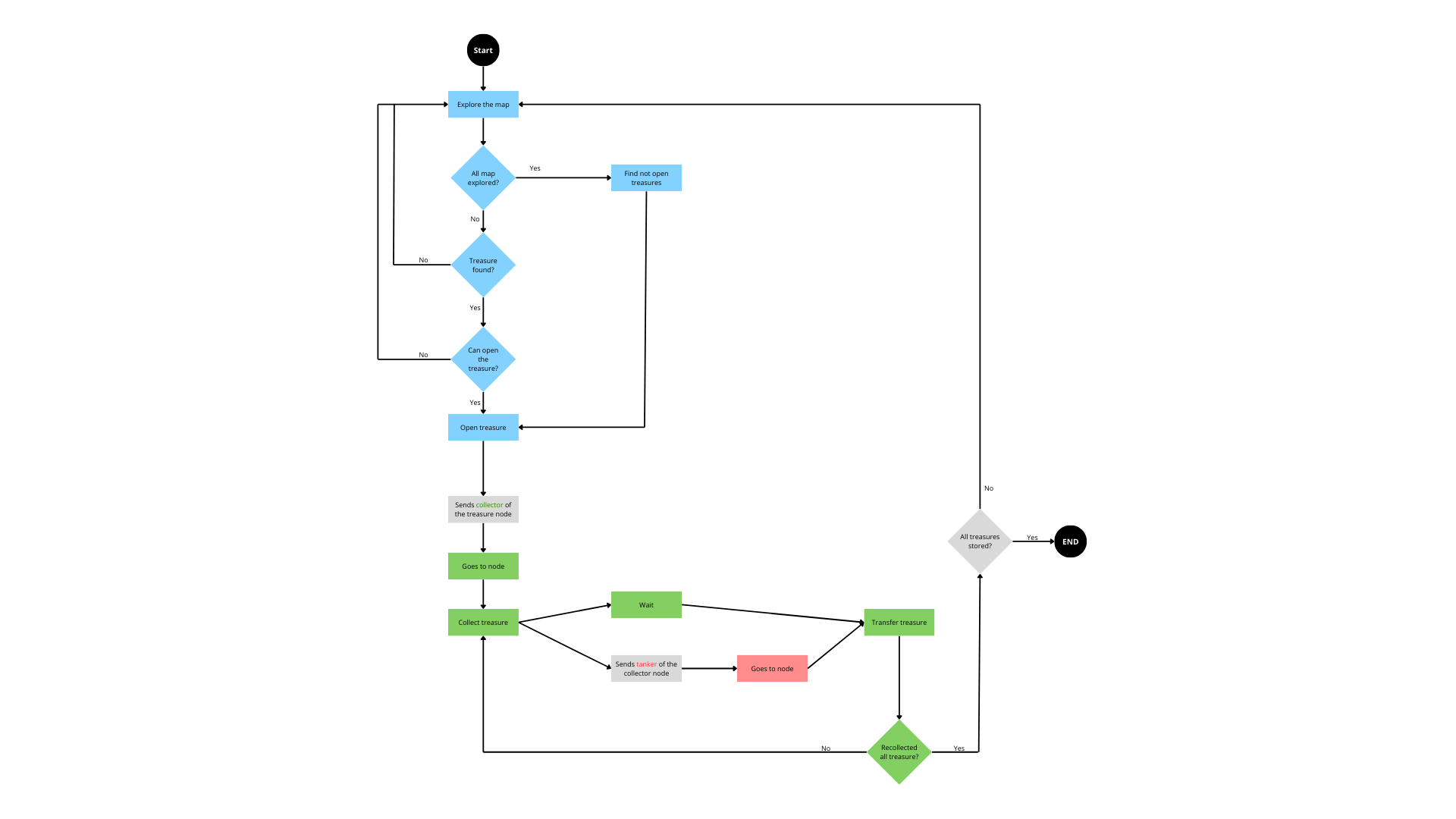
The global flowchart shown in Figure [4] provides a panoramic view of system dynamics and encapsulates the overall process. Agents are represented by different colors: blue for explorers, green for collectors, red for tankers, and gray for the coordinator.
As the agents explore and gather treasure in the environment, the following metrics were kept:
Amount of gold obtained.
Amount of diamonds obtained.
Number of movements per agent needed to complete the treasure hunt.
These metrics will be used to evaluate the performance of our system.
In our runs, we found that the highest possible amount of gold and diamonds was gathered. This is possible due to the contract net and manager coordination. Without these methodologies gathering the 100 gold and 100 diamond treasures was almost impossible since it depended on two agents being within range of each other and the treasure at the same moment randomly. Gathering the other treasures took between 20 and 30 minutes in most cases with a tickrate of 200ms, which is far from ideal as well. When these two tools were introduced performance increased greatly. In comparison, the multi agent system implemented completed the treasure hunt within 2 minutes approximately, with a 30 units of communication range.
Additionally, we found that all the involved agents moved an average of 500 times (over 5 executions). This result may seem a bit strange, however, it is due to the fact that an agent is never static. As seen in the code, an agent without an explicit mission will continue to move randomly, which explains the even divide of the steps. This behaviour is good since it foments exploration, however, if there were any physical constraints to consider, such as gas cost or time of travel, it might be better to use a utility function that punishes unnecessary movements.
Our work in the current project of multi-agent systems within the JADE environment has opened up exciting options for further research. Building upon the foundations of this project, several possible directions emerge, offering opportunities to dive deeper into the complexities of intelligent agent interactions and contribute to the evolving landscape of artificial intelligence.
Enhance Agent Behaviors: As a natural progression, future work could focus on refining and expanding agent behaviors. Investigating more complex decision-making processes, learning mechanisms, and social norms would contribute to a more sophisticated representation of intelligent agents, making them better equipped to navigate diverse and dynamic scenarios.
Integration of Machine Learning Techniques: Incorporating machine learning techniques into the behavior of intelligent agents can elevate the adaptability and predictive capabilities of the system. Future work could explore the integration of reinforcement learning, or other advanced machine learning methodologies to empower agents with the ability to autonomously improve their decision-making over time.
Scalability and Performance Optimization: Addressing the scalability of the JADE environment is crucial for simulating larger and more complex multi-agent systems. Future efforts could be directed toward optimizing the performance and exploring techniques to handle a higher volume of agents and interactions while maintaining efficiency.
Real-World Applications: Transitioning from simulation to real-world applications represents a challenge. Future research could involve adapting the JADE environment for practical use cases, such as optimizing the flow of robots in a warehouse, coordinating autonomous vehicles, etc. This transition would require addressing real-world uncertainties and complexities in dynamic environments and with agent interactions in much more complex scenarios.
In summary, our current project sets the first step for many possible scenarios of future work on a more complex and interesting level. By pushing the boundaries and extending our exploration into these suggested areas, we anticipate contributing to the advancement of multi-agent systems and their practical applications in artificial intelligence.
The implementation of this project in the multi-agent systems field has provided us with a practical platform to apply the theoretical concepts learned throughout the course. We successfully defined the environment, agents, and their behaviors, and created the interactions and common goals within the JADE framework. The project allowed us to understand in a practical way how multi-agent systems operate in simulated scenarios with the complexities and advantages of agent communication and cooperation mechanisms, to adapt and collaborate effectively.
Throughout the entire development, we encountered many challenges associated with the different possible configurations of the project such as the levels of hierarchy, number of coordinators, range of communication, etc. that led us to test iteratively multiple approaches to solve optimally the main goal, ending up with a different approach that the one that we considered in the early design stage.
However, this journey of multiple iterations in the implementation has been an enriching experience, solidifying our foundation in multi-agent systems. We finish this project with a deeper appreciation for the challenges and possibilities presented by intelligent agents working together, and we look forward to applying these skills in future and more challenging endeavors.